
Городской робот НАСА, Urbie, оснащен программно управляемыми камерами и датчиками, которые позволяют ему автономно работать на многих типах местности. URBIE проверяет области, которые могут представлять потенциальный риск для исследователей-людей.
На самом базовом уровне человек состоит из пяти основных компонентов:
- Строение тела
- Мышечная система, чтобы переместить структуру тела
- Сенсорная система, которая получает информацию о теле и окружающей среде.
- Источник питания для активации мышц и датчиков
- Система мозга, которая обрабатывает сенсорную информацию и сообщает мышцам, что делать.
Робот состоит из тех же компонентов. Типичный робот имеет подвижную физическую структуру, своего рода двигатель, сенсорную систему, источник питания и компьютерный «мозг», который контролирует все эти элементы. По сути, роботы - это созданная человеком версия животного мира - это машины, которые копируют поведение человека и животных.
В этой статье мы исследуем основную концепцию робототехники и узнаем, как роботы делают то, что они делают.
Джозеф Энгельбергер, пионер в области промышленной робототехники, однажды заметил: «Я не могу дать определение роботу, но я знаю его, когда вижу». Если вы рассмотрите все разные машины, которые люди называют роботами, вы увидите, что дать исчерпывающее определение практически невозможно. У всех свое представление о том, что представляет собой робот.
Вы, наверное, слышали о некоторых из этих известных роботов:
- R2D2 и C-3PO: умные говорящие роботы с множеством индивидуальных особенностей из фильмов «Звездные войны».
- Sony AIBO: робот-собака, которая учится через человеческое взаимодействие
- ASIMO от Honda: робот, который может ходить на двух ногах, как человек
- Промышленные роботы: автоматизированные машины, работающие на сборочных линиях.
- Данные: Почти человеческий андроид из "Звездного пути"
- BattleBots: истребители с дистанционным управлением на Comedy Central
- Роботы для обезвреживания бомб
- Марсоходы НАСА
- HAL: Судовой компьютер в фильме Стэнли Кубрика "2001: Космическая одиссея"
- Robomower: робот для стрижки газонов от Friendly Robotics
- Робот из телесериала «Затерянные в космосе»
- MindStorms: популярный комплект робототехники LEGO
Согласно этому определению, роботы отличаются от других подвижных машин, таких как автомобили, из-за их компьютерного элемента. Во многих новых автомобилях есть бортовой компьютер, но он нужен только для небольших настроек. Вы управляете большинством элементов автомобиля напрямую с помощью различных механических устройств. Роботы отличаются от обычных компьютеров по своей физической природе - к нормальным компьютерам не прикреплено физическое тело.
Дальше мы рассмотрим основные элементы, присутствующие в большинстве современных роботов.
Основы работы с роботами
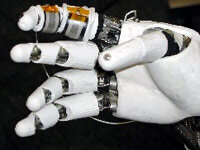
Роботизированная рука, разработанная НАСА, состоит из металлических сегментов, перемещаемых крошечными моторами. Рука - одна из самых сложных структур для воспроизведения в робототехнике.
Подавляющее большинство роботов действительно обладают несколькими общими качествами. Во-первых, почти все роботы имеют подвижное тело. У некоторых есть только моторизованные колеса, а у других есть десятки подвижных сегментов, как правило, из металла или пластика. Как и кости в вашем теле, отдельные сегменты соединены суставами .
Роботы вращают колеса и шарнирно сочлененные сегменты с помощью какого-то привода. Некоторые роботы используют электродвигатели и соленоиды в качестве исполнительных механизмов; некоторые используют гидравлическую систему; а некоторые используют пневматическую систему (систему, приводимую в действие сжатыми газами). Роботы могут использовать все эти типы приводов.
Роботу нужен источник энергии для привода этих приводов. У большинства роботов либо есть аккумулятор, либо они подключаются к стене. Гидравлическим роботам также нужен насос для создания давления в гидравлической жидкости, а пневматическим роботам нужен воздушный компрессор или баллоны со сжатым воздухом.
Все приводы подключены к электрической цепи. Схема напрямую питает электродвигатели и соленоиды, а также активирует гидравлическую систему, управляя электрическими клапанами. Клапаны определяют путь жидкости под давлением через машину. Например, чтобы переместить гидравлическую ногу, контроллер робота открывает клапан, ведущий от гидравлического насоса к поршневому цилиндру, прикрепленному к этой ноге. Жидкость под давлением расширит поршень, поворачивая ногу вперед. Обычно для перемещения своих сегментов в двух направлениях роботы используют поршни, которые могут толкать их в обоих направлениях.
Подъем по лестнице Урби НАСА.
Компьютер робота контролирует все, что подключено к цепи. Для перемещения робота компьютер включает все необходимые двигатели и клапаны. Большинство роботов можно перепрограммировать - чтобы изменить поведение робота, вы просто пишете новую программу на его компьютер.
Не у всех роботов есть сенсорные системы, и лишь немногие из них способны видеть, слышать, обонять или ощущать вкус. Наиболее распространенное чувство робота - это чувство движения - способность робота отслеживать собственное движение. В стандартной конструкции используются колеса с прорезями, прикрепленные к суставам робота. Светодиод на одной стороне колеса светит луч света через отверстия для светового датчика на другой стороне колеса. Когда робот перемещает определенный сустав, колесо с прорезями вращается. Прорези прерывают световой луч при вращении колеса. Датчик освещенности считывает образец мигающего света и передает данные в компьютер. Компьютер может точно сказать, как далеко шарнир повернулся на основе этого шаблона. Это та же самая базовая система, которая используется в компьютерных мышах.
Это основные гайки и болты робототехники. Робототехники могут комбинировать эти элементы бесконечным количеством способов для создания роботов неограниченной сложности. Дальше мы рассмотрим одну из самых популярных моделей - роботизированную руку.
Роботизированная рука

Роботизированные руки - неотъемлемая часть автомобилестроения.
Термин «робот» происходит от чешского слова robota, которое обычно переводится как «принудительный труд». Это достаточно хорошо описывает большинство роботов. Большинство роботов в мире предназначены для тяжелых повторяющихся производственных работ. Они справляются с задачами, которые трудны, опасны или скучны для людей.
Самым распространенным производственным роботом является роботизированная рука. Типичная роботизированная рука состоит из семи металлических сегментов, соединенных шестью шарнирами. Компьютер управляет роботом, вращая отдельные шаговые двигатели, подключенные к каждому суставу (некоторые большие руки используют гидравлику или пневматику). В отличие от обычных двигателей, шаговые двигатели двигаются с точным приращением (см. Anaheim Automation, чтобы узнать, как). Это позволяет компьютеру очень точно перемещать руку, повторяя одно и то же движение снова и снова. Робот использует датчики движения, чтобы убедиться, что он перемещается на нужную величину.
Промышленный робот с шестью суставами очень похож на человеческую руку - у него есть эквивалент плеча, локтя и запястья. Обычно плечо крепится к неподвижной базовой конструкции, а не к подвижному телу. Этот тип робота имеет шесть степеней свободы , что означает, что он может поворачиваться шестью разными способами. Для сравнения, человеческая рука имеет семь степеней свободы.
Работа вашей руки - двигать рукой с места на место. Точно так же роботизированная рука перемещает концевой эффектор с места на место. Вы можете оборудовать роботизированные манипуляторы всевозможными концевыми эффекторами, которые подходят для конкретного применения. Один из распространенных конечных эффекторов - это упрощенная версия руки, которая может захватывать и переносить различные предметы. Роботизированные руки часто имеют встроенные датчики давления, которые сообщают компьютеру, насколько сильно робот держит определенный объект. Это предохраняет робота от падения или поломки всего, что он несет. К другим концевым эффекторам относятся паяльные лампы, дрели и малярные машины.
Промышленные роботы предназначены для того, чтобы делать одно и то же в контролируемой среде снова и снова. Например, робот может закручивать крышки на банках с арахисовым маслом, идущих по конвейеру. Чтобы научить робота выполнять свою работу, программист управляет движением руки с помощью портативного контроллера. Робот сохраняет точную последовательность движений в своей памяти и делает это снова и снова каждый раз, когда с конвейера выходит новая единица.
Большинство промышленных роботов работают на сборочных конвейерах, собирая автомобили. Роботы могут выполнять большую часть этой работы более эффективно, чем люди, потому что они очень точны. Они всегда сверлят в одном и том же месте и всегда затягивают болты с одинаковым усилием, независимо от того, сколько часов они проработали. Роботы-производители также очень важны в компьютерной индустрии. Чтобы собрать крошечный микрочип, нужна невероятно точная рука.
Написание о роботах
Чешский драматург Карел Чапек ввел термин « робот» в свою пьесу 1920 года «RUR». В пьесе рабочие-машины свергают своих создателей-людей, когда ученый дает им эмоции. Десятки авторов и режиссеров пересматривали этот сценарий на протяжении многих лет.
Айзек Азимов в нескольких романах и рассказах придерживался более оптимистичного взгляда. В его работах роботы - добрые, полезные существа, которые придерживаются кодекса ненасилия по отношению к людям - «Законов робототехники».
Мобильные роботы

Марсоход НАСА FIDO Rover предназначен для исследования Марса.
Роботизированные руки относительно легко построить и запрограммировать, потому что они работают только в ограниченном пространстве. Все становится немного сложнее, когда вы отправляете в мир робота.
Первое препятствие - дать роботу работающую систему передвижения. Если роботу нужно будет двигаться только по ровной поверхности, лучше всего подойдут колеса или гусеницы. Колеса и гусеницы также могут работать на пересеченной местности, если они достаточно большие. Но дизайнеры роботов часто вместо этого обращают внимание на ноги , потому что они более адаптируемы. Создание роботов на ногах также помогает исследователям понять естественное передвижение - это полезное упражнение в биологических исследованиях.

Робот Fujitsu HOAP-1
Обычно гидравлические или пневматические поршни перемещают ноги робота вперед и назад. Поршни прикрепляются к разным сегментам ног так же, как мышцы прикрепляются к разным костям. Это настоящий трюк - заставить все эти поршни правильно работать вместе. В детстве вашему мозгу приходилось точно определять правильную комбинацию мышечных сокращений, чтобы ходить прямо, не падая. Точно так же конструктор робота должен выяснить правильную комбинацию движений поршня, участвующих в ходьбе, и запрограммировать эту информацию в компьютер робота. Многие мобильные роботы имеют встроенную систему балансировки (например, набор гироскопов), которая сообщает компьютеру, когда ему необходимо исправить свои движения.

Frogbot НАСА использует пружины, рычаги и двигатели, чтобы прыгать с места на место.
Двуногие передвижения (ходьба на двух ногах) по своей природе нестабильны, поэтому их очень сложно реализовать в роботах. Чтобы создать более устойчивые ходунки-роботы, дизайнеры обычно обращаются к животному миру, особенно к насекомым. Шестиногие насекомые обладают исключительно хорошим балансом и хорошо приспосабливаются к разнообразной местности.
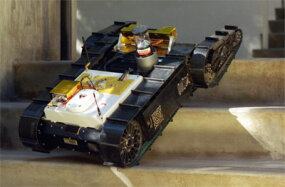
Некоторыми мобильными роботами управляют дистанционно: человек говорит им, что и когда делать. Пульт дистанционного управления может связываться с роботом через подключенный провод или с помощью радио- или инфракрасных сигналов. Удаленные роботы, часто называемые марионеточными роботами, полезны для исследования опасных или труднодоступных мест, таких как глубокое море или вулкан. Некоторыми роботами дистанционно можно управлять только частично. Например, оператор может направить робота в определенное место, но не направить его туда - робот найдет свой путь.
Для чего это?
Мобильные роботы заменяют людей разными способами. Некоторые исследуют другие планеты или негостеприимные районы на Земле, собирая геологические образцы. Другие ищут противопехотные мины на бывших полях сражений. Полиция иногда использует мобильных роботов для поиска бомбы или даже для задержания подозреваемого.
Мобильные роботы также работают в домах и на предприятиях. Больницы могут использовать роботов для транспортировки лекарств. Некоторые музеи используют роботов для патрулирования своих галерей в ночное время, контролируя качество воздуха и уровень влажности. Несколько компаний разработали роботы-пылесосы.
Автономные роботы

Автономный Urbie предназначен для различных городских операций, включая военную разведку и спасательные операции.
Автономные роботы могут действовать самостоятельно, независимо от контроллера. Основная идея состоит в том, чтобы запрограммировать робота определенным образом реагировать на внешние раздражители. Очень простой робот, работающий по принципу bump-and-go, является хорошей иллюстрацией того, как это работает.
У такого робота есть датчик на бампере для обнаружения препятствий. Когда вы включаете робота, он движется по прямой линии. Когда он наконец сталкивается с препятствием, его датчик на бампере сталкивается с ним. Программирование робота говорит ему отступить, повернуть направо и снова двинуться вперед в ответ на каждый удар. Таким образом, робот меняет направление каждый раз, когда сталкивается с препятствием.
Продвинутые роботы используют более сложные версии той же идеи. Робототехники создают новые программы и сенсорные системы, чтобы сделать роботов более умными и восприимчивыми. Сегодня роботы могут эффективно перемещаться в самых разных средах.
Более простые мобильные роботы используют инфракрасные или ультразвуковые датчики, чтобы видеть препятствия. Эти датчики работают так же, как эхолокация животных: робот излучает звуковой сигнал или луч инфракрасного света и обнаруживает отражение сигнала. Робот определяет расстояние до препятствий в зависимости от того, сколько времени требуется сигналу, чтобы вернуться в исходное состояние.

Взгляд урби.
Более продвинутые роботы используют стереозрение, чтобы видеть мир вокруг себя. Две камеры дают этим роботам восприятие глубины, а программное обеспечение для распознавания изображений дает им возможность определять местонахождение и классифицировать различные объекты. Роботы также могут использовать микрофоны и датчики запаха для анализа окружающего мира.
Некоторые автономные роботы могут работать только в знакомой ограниченной среде. Роботы-газонокосилки, например, зависят от заглубленных пограничных знаков, определяющих границы своего двора. Роботу-уборщику офисов может потребоваться карта здания, чтобы перемещаться от точки к точке.
Более продвинутые роботы могут анализировать и адаптироваться к незнакомой среде, даже в районах с пересеченной местностью. Эти роботы могут связывать определенные модели местности с определенными действиями. Робот-марсоход, например, может построить карту земли перед ним на основе своих визуальных датчиков. Если на карте изображена очень ухабистая местность, робот знает, что нужно двигаться другим путем. Такая система очень полезна для исследовательских роботов, работающих на других планетах (см. JPL Robotics, чтобы узнать больше).
Альтернативный дизайн робота использует менее структурированный подход - случайность. Когда этот тип робота застревает, он двигает своими придатками в разные стороны, пока что-то не сработает. Датчики силы работают очень тесно с исполнительными механизмами, а не компьютером, управляющим всем на основе программы. Это что-то вроде того, как муравей пытается преодолеть препятствие - он, кажется, не принимает решения, когда ему нужно преодолеть препятствие, он просто продолжает пробовать что-то, пока не преодолеет его.
Домашние роботы
В последних двух разделах мы рассмотрели наиболее важные области в мире роботов - промышленную робототехнику и исследовательскую робототехнику. Профессионалы в этих областях за эти годы сделали большинство крупных достижений в области робототехники, но они не единственные, кто делает роботов. На протяжении десятилетий небольшая, но увлеченная группа любителей создавала роботов в гаражах и подвалах по всему миру.Домашняя робототехника - это быстро растущая субкультура со значительным присутствием в Интернете. Робототехники-любители собирают свои творения, используя коммерческие наборы роботов, компоненты для заказа по почте, игрушки и даже старые видеомагнитофоны.
Роботы-самогонщики так же разнообразны, как и профессиональные роботы. Некоторые робототехники выходного дня возятся со сложными шагающими машинами, некоторые создают собственных сервисных ботов, а третьи создают конкурентоспособных роботов. Самые известные соревновательные роботы - это истребители с дистанционным управлением, как вы могли видеть в «BattleBots». Эти машины не считаются «настоящими роботами», потому что у них нет перепрограммируемого компьютерного мозга. По сути, это машины с дистанционным управлением.
Более продвинутые конкурентоспособные роботы управляются компьютером. Например, футбольные роботы играют в миниатюрный футбол без участия человека. Стандартная команда футбольных ботов состоит из нескольких отдельных роботов, которые обмениваются данными с центральным компьютером. Компьютер «видит» все футбольное поле с помощью видеокамеры и выбирает членов своей команды, членов соперника, мяч и цель в зависимости от их цвета. Компьютер ежесекундно обрабатывает эту информацию и решает, как направить свою команду.
Посетите официальный веб-сайт RoboCup для получения дополнительной информации о роботах-футболистах и Google> Компьютеры> Робототехника> Соревнования для получения информации о других соревнованиях роботов. Google> Компьютеры> Робототехника> Строительство предоставит вам больше информации о создании собственных роботов.
Адаптируемый и универсальный
Персональный компьютер революция была отмечена необыкновенной приспособляемостью. Стандартизованное оборудование и языки программирования позволяют компьютерным инженерам и программистам-любителям формировать компьютеры для своих конкретных целей. Компоненты компьютера похожи на принадлежности для рисования - они имеют бесконечное количество применений.На сегодняшний день большинство роботов больше похожи на кухонные приборы. Робототехники создают их с нуля для довольно конкретной цели. Они плохо адаптируются к радикально новым приложениям.
Эта ситуация может измениться. Компания под названием Evolution Robotics является пионером в мире адаптируемого аппаратного и программного обеспечения для робототехники. Компания надеется занять нишу с помощью простых в использовании «наборов для разработчиков роботов».
Наборы поставляются с открытой программной платформой, адаптированной к ряду общих роботизированных функций. Например, робототехники могут легко дать своим созданиям возможность следовать за целью, слушать голосовые команды и маневрировать вокруг препятствий. Ни одна из этих возможностей не является революционной с технологической точки зрения, но необычно, что вы найдете их в одном простом пакете.
В комплекты также входит обычное оборудование для робототехники, которое легко подключается к программному обеспечению. В стандартный комплект входят инфракрасные датчики, моторы, микрофон и видеокамера. Робототехники собрали все эти детали вместе в усовершенствованный монтажный набор - набор алюминиевых деталей корпуса и прочных колес.
Эти комплекты, конечно, не являются вашими заурядными конструкторами. При цене выше 700 долларов это не дешевые игрушки. Но они - большой шаг к новому виду робототехники. В ближайшем будущем создание нового робота для уборки дома или ухода за домашними животными в ваше отсутствие может быть столь же простым, как написание программы BASIC для балансировки вашей чековой книжки.
Роботы и искусственный интеллект

Китано PINO «человекоподобный робот».
Искусственный интеллект (ИИ), пожалуй, самая захватывающая область робототехники. Это, безусловно, самый противоречивый вопрос: все согласны с тем, что робот может работать на конвейере, но нет единого мнения о том, может ли робот когда-либо быть умным.
Как и сам термин «робот», искусственный интеллект сложно дать определение. Совершенный ИИ был бы воссозданием человеческого мыслительного процесса - созданной человеком машины с нашими интеллектуальными способностями. Это будет включать в себя способность учиться чему угодно, способность рассуждать, способность использовать язык и способность формулировать оригинальные идеи. Робототехники и близко не достигли такого уровня искусственного интеллекта, но они добились большого прогресса с более ограниченным ИИ. Сегодняшние машины искусственного интеллекта могут воспроизводить некоторые специфические элементы интеллектуальных способностей.
Компьютеры уже могут решать проблемы в ограниченных областях. Основная идея решения проблем ИИ очень проста, хотя ее выполнение сложно. Во-первых, робот или компьютер ИИ собирает факты о ситуации с помощью датчиков или человека. Компьютер сравнивает эту информацию с сохраненными данными и решает, что эта информация означает. Компьютер выполняет различные возможные действия и предсказывает, какое действие будет наиболее успешным, на основе собранной информации. Конечно, компьютер может решать только те задачи, которые он запрограммирован решать - у него нет обобщенных аналитических способностей. Шахматные компьютеры - один из примеров такого рода машин.
Некоторые современные роботы также обладают ограниченной способностью к обучению. Обучающиеся роботы распознают, достигло ли определенное действие (например, движение его ног определенным образом) желаемого результата (преодоление препятствия). Робот сохраняет эту информацию и пытается выполнить успешное действие, когда в следующий раз сталкивается с такой же ситуацией. Опять же, современные компьютеры могут делать это только в очень ограниченных ситуациях. Они не могут воспринимать любую информацию, как человек. Некоторые роботы могут учиться, имитируя действия человека. В Японии робототехники научили робота танцевать, демонстрируя сами движения.
Некоторые роботы могут общаться социально. Кисмет, робот из лаборатории искусственного интеллекта Массачусетского технологического института , распознает язык тела и интонацию голоса и реагирует соответствующим образом. Создателей Kismet интересует, как взаимодействуют люди и младенцы, основываясь только на тоне речи и визуальной подсказке. Это низкоуровневое взаимодействие могло бы стать основой системы обучения, подобной человеческой.
Кисмет и другие гуманоидные роботы в лаборатории искусственного интеллекта Массачусетского технологического института работают с нетрадиционной структурой управления. Вместо того, чтобы направлять каждое действие с помощью центрального компьютера, роботы управляют действиями нижнего уровня с помощью компьютеров нижнего уровня. Директор программы Родни Брукс считает, что это более точная модель человеческого интеллекта. Большинство вещей мы делаем автоматически; мы не решаем делать их на высшем уровне сознания.
Настоящая проблема ИИ - понять, как работает естественный интеллект. Разработка искусственного интеллекта - это не создание искусственного сердца - у ученых нет простой конкретной модели, на которой можно было бы работать. Мы знаем, что мозг содержит миллиарды и миллиарды нейронов, и что мы думаем и учимся, устанавливая электрические связи между различными нейронами. Но мы не знаем точно, как все эти связи складываются в более высокие рассуждения или даже на низкоуровневые операции. Сложная схемотехника кажется непонятной.
Из-за этого исследования ИИ в основном теоретические. Ученые выдвигают гипотезы о том, как и почему мы учимся и думаем, и экспериментируют со своими идеями с помощью роботов. Брукс и его команда сосредотачиваются на роботах-гуманоидах, потому что они считают, что способность воспринимать мир как человек имеет важное значение для развития человеческого интеллекта. Это также упрощает взаимодействие людей с роботами, что потенциально облегчает роботу обучение.
Подобно тому, как физический роботизированный дизайн - удобный инструмент для понимания анатомии животных и человека, исследования ИИ полезны для понимания того, как работает естественный интеллект. Для некоторых робототехников это понимание является конечной целью разработки роботов. Другие представляют мир, в котором мы живем бок о бок с интеллектуальными машинами и используем множество меньших роботов для ручного труда, здравоохранения и общения. Ряд экспертов по робототехнике предсказывают, что эволюция роботов в конечном итоге превратит нас в киборгов - людей, интегрированных с машинами. Возможно, в будущем люди смогут погрузить свой разум в крепкого робота и жить тысячи лет!
В любом случае в будущем роботы, безусловно, будут играть более важную роль в нашей повседневной жизни. В ближайшие десятилетия роботы постепенно перейдут из промышленного и научного мира в повседневную жизнь, точно так же, как компьютеры распространились в доме в 1980-х годах.
Лучший способ понять роботов - взглянуть на конкретные конструкции.
ИИ в кино
- 2001: Космическая одиссея
- Двухсотлетний человек
- Бегущий по лезвию
- Семя Демона
- Матрица
- Короткое замыкание
- Терминатор
- Westworld